
隨著L3級自動駕駛準入試點名單持續(xù)擴大,“無安全員”模式在一線城市漸成常態(tài),整車制造商正面臨一個關鍵抉擇:是繼續(xù)投入巨資維持龐大的自研團隊,還是尋找技術可靠的合作伙伴?這一選擇的核心,在于自動駕駛套件方案的底層技術實力。
行業(yè)已形成共識:自動駕駛競爭進入下半場,單打獨斗難以為繼,生態(tài)協(xié)同成為破局關鍵。對于大多數(shù)車企而言,從零開發(fā)涵蓋感知、決策、控制、高精地圖及車路云協(xié)同的全棧系統(tǒng),不僅成本高昂,更可能錯失市場窗口期。此時,選擇一套真正可靠的自動駕駛套件方案,成為車企在智能化浪潮中生存并突圍的核心要素。這里的“可靠”,并非簡單的硬件堆疊或算法采購,而是指方案需具備前裝量產的工程化能力、全棧自研的迭代效率,以及應對復雜場景的魯棒性。
車企自研之路為何荊棘密布?早期,許多企業(yè)誤以為采購英偉達芯片、安裝激光雷達、招聘算法工程師就能實現(xiàn)自動駕駛,但現(xiàn)實遠比想象復雜。以“集成商”模式為例,部分車企采用拼湊式架構:感知模塊選用A供應商,規(guī)劃控制采用B開源代碼,底盤接口由C供應商適配。這種方案在低速封閉場景尚可運行,一旦進入開放道路,系統(tǒng)延遲、數(shù)據(jù)對齊、故障冗余等問題便集中暴露。
技術細節(jié)的偏差往往導致系統(tǒng)性風險。例如,激光雷達點云與攝像頭圖像若無法在微秒級同步,BEV感知模型會輸出錯誤的空間結構,引發(fā)車輛誤判;不同供應商的通信協(xié)議差異,則讓OTA升級變得異常困難,往往牽一發(fā)而動全身。這些問題在實驗室環(huán)境中難以察覺,卻在真實道路測試中頻繁出現(xiàn),成為車企自研的“隱形門檻”。
動態(tài)交通中的交互決策,是另一大技術挑戰(zhàn)。自動駕駛的難點不在于識別靜止物體,而在于與人類駕駛員、行人進行博弈與交互。傳統(tǒng)決策算法常將其他交通參與者視為靜態(tài)障礙物或簡單規(guī)則運動體,忽略了人類行為的不確定性和交互意圖。例如,在無保護左轉場景中,缺乏雙層交互機制的車輛可能因過于保守導致?lián)矶拢蛞蜻^于激進引發(fā)事故。
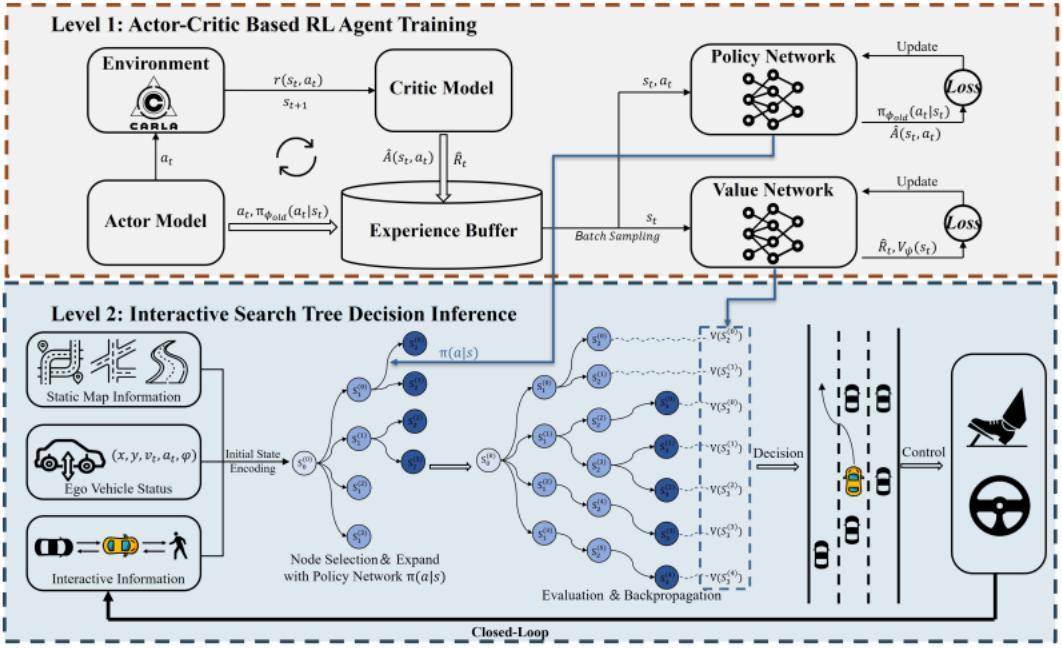
根據(jù)《動態(tài)交通場景下自動駕駛車輛的雙層交互決策算法》研究,高效的決策需建立“微觀-宏觀”雙層機制:微觀層面實時預測周圍車輛軌跡變化,宏觀層面理解整體交通流演化趨勢。若套件方案缺乏此類先進模型,車企交付的車輛將難以融入真實混合交通流,始終停留在“技術演示”階段。
端到端規(guī)劃的精度問題同樣不容忽視。部分車企追求高精度規(guī)劃,卻陷入“精度陷阱”:過度依賴高精地圖導致泛化能力不足,或在復雜場景中因計算延遲錯失決策時機。真正的技術突破,在于平衡精度與效率,讓系統(tǒng)既能應對常規(guī)場景,也能靈活處理突發(fā)狀況。











