在2026年3月16日開幕的NVIDIA 年度開發者大會GTC 2026大會上,英偉達不僅發布了Vera Rubin平臺、Groq 3 LPU等全新算力硬件,面向物理AI,還發布Isaac GR00T N1.7專為人形機器人打造的視覺語言動作(VLA)推理模型,推出開放式Physical AI數據工廠藍圖(Open Physical AI Data Factory Blueprint),以加速機器人、視覺 AI代理和自動駕駛汽車開發。
這場全球AI開發者盛會傳遞出一個清晰信號:人工智能正快速從數據中心走向物理世界,Physical AI(物理AI)已成為產業界的全新戰場。當數字智能與物理世界深度耦合,機器人不再僅僅是執行預設程序的自動化設備,而是能夠感知、推理并與環境實時交互的智能實體。
這場變革的核心支柱,正是被譽為“數字心臟”的邊緣計算算力。
為什么算力決定了機器人的進化邊界?
在傳統自動化時代,機器人的任務是“從 A 點到 B 點”。但隨著大模型(VLM/LLM)和神經輻射場(NeRF)等技術進入工業現場,機器人需要處理的數據量呈指數級增長。
一個具備具身智能的機器人,必須在本地處理以下任務:
? 多模態感知:實時融合 3D 激光雷達、深度相機及觸覺傳感器的數據,構建完整的物理環境認知。 ? 實時路徑規劃:在動態、復雜的工業或倉儲環境中實現厘米級的避障與決策,響應延遲需控制在毫秒級。 ? 具身大模型推理:理解自然語言指令并將其轉化為具體的物理動作序列,完成復雜場景的自主決策。
這意味著,機器人的算力儲備不再是“夠用就好”,而是必須擁有足夠的算力冗余,以支撐未來算法的快速迭代,適配不斷升級的智能交互需求。
全球具身智能“算力玩家”大盤點
目前,全球頂尖的機器人廠商正處于一場算力的“軍備競賽”中。我們選取了幾個具有代表性的頭部企業及其核心產品的算力配置,結合官方公開信息進行深度剖析。
Tesla Optimus
特斯拉的 Optimus 是具身智能人形機器人的先驅,其算力底座直接移植了汽車端的FSD(Full Self-Driving)Hardware 4.0芯片。
計算平臺:雙FSD HW4.0芯片架構。依托特斯拉Dojo超算集群進行云端大規模訓練,邊緣側憑借雙芯片架構實現極強的視覺感知處理能力,支撐復雜的雙足平衡控制與手部精細操作。

Figure 03
作為與 OpenAI 深度合作的明星廠商,Figure AI于2025年推出新一代通用人形機器人Figure 03 追求極簡硬件結構與極致智能體驗的平衡。
計算平臺:行業普遍實測與推測其搭載NVIDIA Jetson AGX Orin 64GB高階版本。板載算力峰值可達275 TOPS(INT8),既能實現流暢的自然語音交互,也能通過端到端神經網絡完成高精度物體抓取、姿態調整等復雜動作,適配日常家庭服務場景,完成折疊衣服、洗碗、整理房間等復雜家務。

Geek+ Gino 1
作為全球倉儲機器人的領跑者,極智嘉 (Geek+) 今年發布了全球首款倉儲場景原生的通用輪式人形機器人,填補了工業倉儲具身智能的空白。
計算平臺:Gino 1 采用NVIDIA Jetson Thor芯片,提供2,070 FP4 TFLOPS算力

UBTECH Walker S2
優必選科技于2025年7月發布的全尺寸工業人形機器人Walker S2,主要應用于智能制造領域。2025年11月,第1000臺Walker S2下線,標志著其正式進入規模化量產階段
計算平臺:Walker S2搭載的是Jetson AGX Thor平臺

核心指標對比:誰才是“算力之王”?
下表根據各家官方發布信息、行業權威技術調研整理,標注了主流具身智能機器人的計算架構、算力與應用場景:
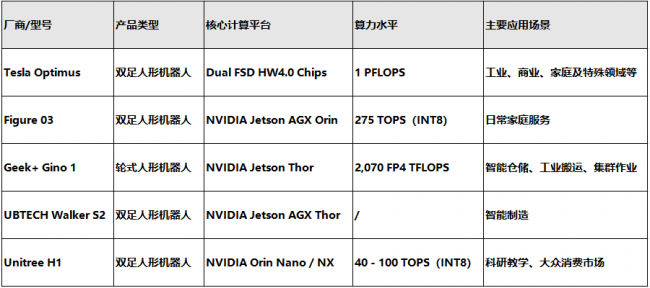
注:TOPS (Tera Operations Per Second) 指每秒進行萬億次操作,是衡量邊緣計算推理能力的核心指標;部分產品算力未完全公開,標注為行業實測/官方定位水平。
結語:邊緣計算的終局
具身智能的下半場,不再是比拼誰的機器人“走得穩”,而是比拼誰的機器人“想得快”、決策準、適配強。
在這場“機器人算力賽跑”中,擁有真實業務場景支撐、且在算力架構上提前布局預埋的領軍者,無疑握有通往機器人時代的頭等艙門票。邊緣算力的迭代速度,也將直接決定具身智能商業化落地的節奏與邊界。