3月18日消息,理想汽車創(chuàng)始人李想今晚發(fā)文,揭開了全球車企與科技公司投入巨資卻進展有限的核心原因,并給出理想的技術破局方案。
李想指出,人類在幼年就通過活動建立了完整的3D物理空間認知,這是安全駕駛的基礎。
而行業(yè)主流方案一直是用2D視頻訓練AI,相當于只看行車記錄儀就上路。傳統(tǒng)BEV架構會丟失高度信息,OCC方案缺少語義信息,AI始終無法像人一樣真正理解三維世界,這是行業(yè)進展緩慢的關鍵癥結。
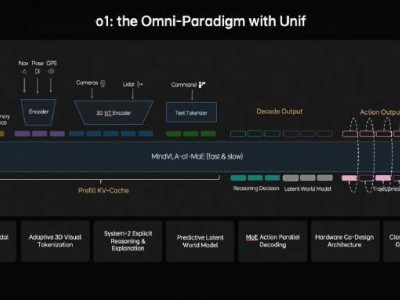
針對這一痛點,理想推出核心突破——原生3D ViT三維視覺編碼器,讓模型從一開始就工作在3D空間,同步完成幾何結構與語義理解。
配合自研馬赫芯片提供的三倍算力支撐,這套系統(tǒng)可穩(wěn)定感知500米以上范圍,激光雷達則轉變?yōu)楦呔葮硕üぞ摺?/p>
MindVLA?o1實現(xiàn)了空間理解、推理決策、駕駛行為的統(tǒng)一建模,具備多模態(tài)思考能力,可在隱空間模擬場景變化。
李想表示,該模型不只是用于自動駕駛,還能適配機器人,正逐步成為通用物理世界智能體,自動駕駛只是物理AI的起點。