在智能家居領域,一項突破性技術正悄然改變服務機器人的能力邊界。由頂尖科研團隊開發的GarmentPile++系統,首次賦予機器人處理復雜衣物堆疊場景的"管家級"操作能力。這項成果不僅攻克了柔性物體操作的行業難題,更在機器人領域國際頂會ICRA 2026引發關注,其核心模塊更成為《EAI-100具身智能領域2025年度百項代表性成果》的十大Demo項目之一。
傳統服務機器人面對衣物整理任務時,往往陷入"能看不能動"的困境。當多件衣物出現顏色相近、相互纏繞或部分遮擋時,機械臂要么因誤判邊界而抓取失敗,要么在操作過程中牽連其他衣物。更棘手的是,不同材質衣物的物理特性差異顯著——絲綢易滑、棉質易皺、針織易變形,這些特性都要求機器人具備精準的環境感知與決策能力。
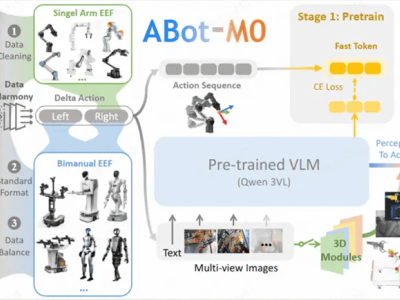
研發團隊通過構建"認知-決策-執行"的完整技術鏈,成功破解這些難題。在視覺識別階段,系統采用改進型SAM2分割算法,結合顏色分布、紋理特征和邊緣檢測技術,即使面對嚴重遮擋的衣物堆,也能精準繪制每件衣物的三維輪廓。當遇到粘連區域時,機器人會啟動動態觀察模式,通過輕微提拉觸發衣物形態變化,利用攝像頭實時追蹤完成邊界確認。
決策系統的創新體現在智能抓取點規劃。系統根據衣物材質、堆疊狀態和目標位置,生成包含風險評估的熱力圖:紅色區域代表最佳抓取點(如平整的衣身中部),藍色區域則標記高風險區域(如易滑落的領口或易變形的袖口)。這種基于物理特性的決策模型,使機器人能根據不同場景靈活調整操作策略。
在執行層面,雙機械臂協同技術展現出顯著優勢。面對T恤等小型衣物,單臂即可完成精準捏取;處理床單、長裙等大件物品時,主臂負責提升主體部分,副臂同步托舉下方區域,通過動態調整夾持力度防止衣物拖地或纏繞。這種類人化的操作方式,使機器人能在保持衣物平整的同時,避免對周圍環境造成干擾。
實驗數據顯示,在開放衣堆和封閉收納筐兩種典型場景中,該系統的任務完成率較現有方法提升42%,平均操作步數減少35%。特別在處理多層纏繞的混合材質衣物時,其成功率達到91.7%,展現出強大的環境適應能力。更值得關注的是,系統通過深度學習模型持續優化操作策略,隨著使用次數增加,其決策效率與操作精度將進一步提升。
這項技術突破標志著服務機器人向真實家庭場景邁出關鍵一步。不同于實驗室環境下的演示項目,GarmentPile++系統專門針對日常生活中的非結構化場景設計,其處理對象包括20余種常見衣物材質,覆蓋從內衣到外套的全品類服裝。研發團隊表示,未來將拓展系統在醫療護理、物流分揀等領域的應用,讓柔性物體操作技術惠及更多行業。